NEWS RELEASE:JR&私鉄 4
| ひろやす/伊藤(vnnc8158) 2017-11-08 21:12:54 |
|
○日 時 : 平成29年11月18日(土)11時00分から
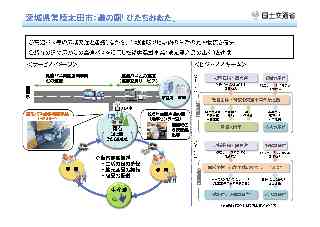
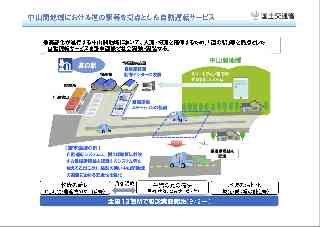
○場 所 : 道の駅「ひたちおおた」イベント広場 (茨城県常陸太田市下河合町1016-1) ○概 要 受付開始: 10時30分から 式典開始: 11時00分から (1)主催者側挨拶 (2)来賓挨拶 (3)実験概要説明 (4)実験車両説明 (5)記念撮影、テープカット (6)実験車両試乗 式典終了: 12時15分頃 ※式典当日は道の駅周辺は、大変混み合うことが予想されます。 実験車両 バスタイプ ①株式会社ディー・エヌ・エー 「レベル4」(専用空間) 「車両自律型」技術 ・GPS、IMUにより自車位置を特定し、規定のルートを走行 (点群データを事前取得) 定 員:6人(着席)(立席含め10名程度) 速 度:10km/h程度(最大:40km/h) ②先進モビリティ株式会社 「レベル4」(専用空間)+「レベル2」(混在交通(公道)) 「路車連携型」技術 ・GPSと磁気マーカ及びジャイロセンサにより自車位置を特定して、既定のルートを走行 定 員:20人 速 度:35km/h程度(最大40km/h)※ 乗用車タイプ ③ヤマハ発動機株式会社[今回使用] 「レベル4」(専用空間)+「レベル2」(混在交通(公道)) 「路車連携型」技術 ・埋設された電磁誘導線からの磁力を感知して、既定ルートを走行 定 員:7人 速 度:自動時~12km/h程度 手動時20km/h未満 ④アイサンテクノロジー株式会社 「レベル4」(専用空間)+「レベル2」(混在交通(公道)) 「車両自律型」技術 ・事前に作製した高精度3次元地図を用い、LIDARで周囲を検知しながら規定ルートを走行 定 員:4人 速 度:40km/h程度(最大50km/h)※ GPS:Global Positioning System,全地球測位システム IMU:Inertial Measurement Unit,慣性計測装置 ※速度は走行する道路に応じた制限速度に適応 地図:地理院地図(電子国土Web) 道の駅「ひたちおおた」における主な検証項目 ①道路・交通 ○相互に円滑な通行のための道路構造の要件 ・後続車の追い越しを考慮した幅員 ・待避所、停留所の設置 ○自動運転に必要となる道路の管理水準 ・植栽の繁茂 ・狭小幅員 ②地域環境 ○降雨による、前方カメラの検知能力 ③コスト ○電磁誘導線の整備、維持管理コスト ○車両の維持管理コスト ④社会受容性 ○自動運転技術への信頼性、乗り心地 ○運転手不在に対する心理的影響 ⑤地域への効果[ビジネスモデルの検討を含む] ○円滑な地域内物流の支援 ・高速バス(貨客混載)との連携による農作物の集荷・配送実験 ・道の駅への宅配便の集荷・発送実験 ○高齢者の外出機会の増加 ・高速バス・路線バスとの乗り継ぎ利便性 ○運営主体のあり方 ・自治体や交通事業者等の役割分担 ○採算性確保の方策 ・将来の利用ニーズ(支払意思額、求めるサービスレベル等) ・農作物の出荷機会の拡大可能性 ・将来の地域の協力体制(企業支援等) ○他事業との連携 ・実験参加者の将来参入ニーズ(高速バス、宅配業者) ・新たな連携先のニーズ |
||||||||
|
||||||||
|
|