NEWS RELEASE:JR&私鉄 4
| まるよし(cfcd3435) 2021-09-27 14:52:05 |
|
2021年9月27日
JR西日本とソフトバンク、「自動運転・隊列走行BRT」の実証実験を開始 西日本旅客鉄道株式会社 ソフトバンク株式会社 西日本旅客鉄道株式会社(以下「JR西日本」)とソフトバンク株式会社(以下「ソフトバンク」)は、自動運転と隊列走行技術を用いたBRT※(以下「自動運転・隊列走行BRT」)の実証実験を、2021年10月から専用テストコース(滋賀県野洲市)で開始します。 両社は、まちづくりと連携した持続可能な地域交通としての次世代モビリティサービスの実現に向けて、「自動運転・隊列走行BRT」の開発プロジェクトを2020年3月に立ち上げました。このプロジェクトでは、日本初となる連節バスの自動運転化および自動運転バス車両の隊列走行の実用化を目指して、専用テストコースの設置など実証実験に向けた準備を進めてきました。このたび、専用テストコースの走行路が完成することに伴い、3種類の自動運転車両(連節バス・大型バス・小型バス)を用いて、車種が異なる自動運転車両が合流して隊列走行などを行う実証実験を開始します。テストコースでの実証実験を通して、「自動運転・隊列走行BRT」の技術確立とシステムの標準パッケージ化を目指し、2020年代半ばをめどに次世代モビリティサービスとして社会実装を進めていきます。 ※BusRapidTransit:バス高速輸送システム 1.「自動運転・隊列走行BRT」サービスが目指す姿 (1)専用道による安全性・定時性・速達性の実現 (2)専用道の利点を生かした自動運転・隊列走行の早期実現 (3)需要に応じた柔軟な輸送力の確保 (4)他の交通手段と連携した一体的でフラットな(段差の少ない)交通網の実現 (5)運転手の担い手不足の解消 (6)シンプルな設備によるローコストなモビリティサービスの実現 2.専用テストコースでの実証実験の概要 (1)所在地 滋賀県野洲市冨波乙 (JR西日本網干総合車両所宮原支所野洲派出所内) (2)主な実証実験項目 ① 自動運転・隊列走行に関する車両の技術検証 ② 自動運転・隊列走行に適した走行環境・地上設備の検討 ③ 乗降場への正着制御や車両の遠隔コントロールなどの運用面の検討 ④ 様々な環境下における上記項目の比較検証を通じた事業性の検討 (3)スケジュール ① 2021年10月 自動運転に向けた車両の機能試験開始 ② 2022年春頃 3種類の自動運転車両を用いた隊列走行の試験開始 ③ 2022年夏頃 乗降場への正着制御や車両の遠隔コントロールなどの運用面の試験開始 ④ 2023年 専用テストコースでの自動運転・隊列走行(先頭車:ドライバー同乗、後続車:無人運転)に関する技術確立(目標) 3.社会実装に向けて 今後両社は、まちづくりと連携した持続可能な地域交通の実現に向けて、ご関心をお持ち頂いた皆様との対話を積極的に進め、次世代モビリティサービスの社会実装を目指していきます。 <参考>2020年3月23日プレスリリース 「JR西日本とソフトバンク、自動運転と隊列走行技術を用いたBRTの開発プロジェクトを開始」 https://www.westjr.co.jp/press/article/items/200323_01_BRT_1.pdf |
||
|
||
|
|

NEWS RELEASE:JR&私鉄 4
| ひろやす/伊藤(vnnc8158) 2023-09-16 15:15:05 |
|
2023年9月15日
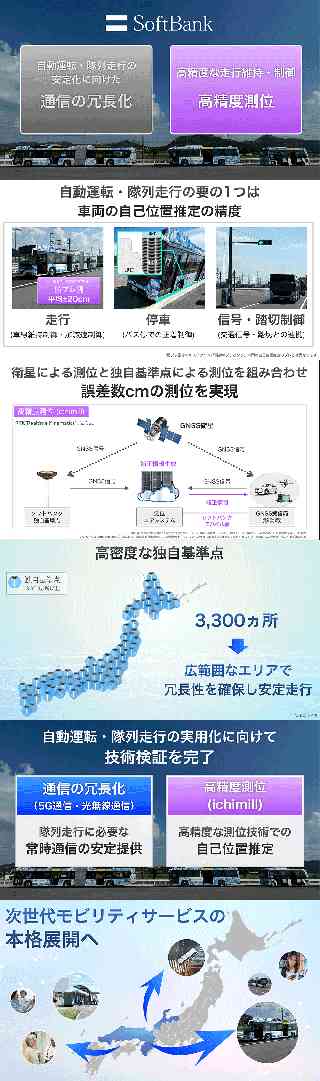
西日本旅客鉄道株式会社 ソフトバンク株式会社 JR西日本とソフトバンクの 「自動運転・隊列走行BRT」開発プロジェクト、 専用テストコースでの実証実験を完了し公道での実証実験を開始 西日本旅客鉄道株式会社(以下「JR西日本」)とソフトバンク株式会社(以下「ソフトバンク」)は、自動運転と 隊列走行技術を用いたBRT※1(以下「自動運転・隊列走行BRT」)の開発プロジェクトにおいて、2021年10月に開始した専用テストコース(滋賀県野洲市)での実証実験を2023年7月に完了し、社会実装に向けた次のステップとして、2023年11月(予定)から公道(広島県東広島市)での実証実験※2を開始します。 ※1 Bus Rapid Transit:バス高速輸送システム ※2 東広島市と連携した取り組みです 1.背景・経緯 両社は、まちづくりと連携した持続可能な地域交通としての次世代モビリティサービスの実現に向けて、3種類の自動運転車両(連節バス・大型バス・小型バス)を用いた「自動運転・隊列走行BRT」の実証実験を、2021年10月から専用テストコースで行ってきました。また同時に、「自動運転・隊列走行BRT」に関心を持つ自治体などとの対話を継続し、都市拠点などにおける公共交通の機能強化と魅力の向上を目的としてBRTの導入を検討する東広島市との連携を進めてきました。 このたび、当初計画していた専用テストコースでの実証実験項目の検証が完了したことから、社会実装に向けた検討を進めるための次のステップとして、東広島市において、日本初となる公道での「自動運転・隊列走行BRT」の実証実験を開始します。 2.専用テストコースでの実証実験の成果 (1)要素技術の検証試験の実績 ①バスの自動運転技術 ・連節バスの自動運転 ・RTK-GNSS※および磁石を使用した自己位置推定 ※GNSS(衛星測位システムの総称)から受信する信号を利用して RTK 測位(相対測位)を行うことで高精度測位を実現する技術 ②バスの自動運転・隊列走行技術 ・異なる車種の組み合わせ/順番での自動運転・隊列走行(先頭車レベル3※1、後続車レベル4<sup?※2 相当) ・先頭車のドライバーの操作による隊列内の全車両のドア開閉、車内アナウンス ・隊列走行での正着制御※3 ※1 一定の条件下でシステムが全ての運転操作を実行、作動継続が困難な場合は、システムの介入要求などに運転者が適切に対応 ※2 一定の条件下でシステムが全ての運転操作および作動継続が困難な場合への対応を実行 ※3 駅・バス停にほぼ隙間なく正確に横付けすること ③信号・踏切連携 ・BRTの位置情報に基づいた単一車線区間での交互通行制御 ・専用道と一般道の交差部を想定した信号・踏切制御 ④運行管理・指令 ・運行管理システムからの指示による隊列形成・解除 ・遠隔地からの車内外監視 ・車両位置に応じた、自動での乗客向け案内の表示・アナウンス ⑤通信技術 ・高い安全性・低遅延のプライベート5Gを使った車車間通信 ・光無線を使った車車間での直接通信 (2)要素技術を組み合わせた総合試験の実績 ①ダイヤを設定した定常運行試験 ②ODD※外となる状況を想定した異常時運行試験 ※Operational Design Domain:自動運転システムが正常に作動する前提となる設計上の走行環境条件 (3)実証実験の実績から得られた成果 ①日本初となる連節バスの自動運転化および自動運転バス車両の隊列走行に成功 ②自動運転、信号制御、運行管理を組み合わせた交通システムのパッケージとして機能させることに成功 ③社会実装に向けて今後向上させる機能や運用方法などの課題を抽出 3.公道での実証実験の概要(予定) (1)目的 ①自動運転・隊列走行技術の社会実装に向けた課題の検証・洗い出しを行うこと ②東広島市民をはじめとした方々にBRTや自動運転・隊列走行などの新技術に関心を持っていただくこと (2)実験区間 広島県東広島市 JR西条駅と広島大学東広島キャンパスを結ぶ県道・市道(愛称:ブールバール) (3)実験期間 2023年11月~2024年2月 (4)実験車両 連節バス、大型バス(計2台) (5)主な実験内容 ①電波状況や勾配などの自動運転に影響を与える走行環境の検証 ②連節バスと大型バスの2台による自動運転・隊列走行の実証走行※と課題の検証 ③実証実験の実施によるBRTや自動運転・隊列走行などの新技術に関する社会受容性の変化の測定 ※レベル2(ドライバーが運転操作の主体であり、システムがアクセル・ブレーキ操作およびハンドル操作の両方を部分的に実行)で実施 (6)試乗会 東広島市民をはじめとした方々に「自動運転・隊列走行BRT」を体験していただくための試乗会を予定しています。 4.今後の展開 今後両社は、「自動運転・隊列走行BRT」の社会実装に向けた取り組みを進め、2020年代半ばをめどに自動運転レベル4の許認可取得を目指します。地域のまちづくりの取り組みと連携し、持続可能な次世代モビリティサービスの実現を目指します。 <参考> 2021年9月27日付のプレスリリース 「JR西日本とソフトバンク、『自動運転・隊列走行BRT』の実証実験を開始」 https://www.westjr.co.jp/press/article/items/210927_01_brt.pdf |
||||||||||
|
||||||||||
|
|




NEWS RELEASE:JR&私鉄 4
| ひろやす/伊藤(vnnc8158) 2023-09-16 15:15:36 |
|
別 紙
専用テストコースにおける要素技術の検証試験の実績 (1)バスの自動運転技術 ①連節バスの自動運転 3軸目を駆動輪とする連節バスの自動運転に成功しました。乗車定員が多い連節バスの自動運転により、1台の車両で大きな輸送力を実現できます。 ②RTK-GNSSおよび磁石を使用した自己位置推定 RTK-GNSSおよび磁石の読み取りによる2種類の自己位置推定技術を場所によって切り替えて、最高速度40km/hでの自動運転・隊列走行時に横ぶれ幅を平均±20cm以下、最大±30cmに抑えるという目標を達成しました。社会実装時には、場所により自己位置推定方法を変えることで、自動運転・隊列走行の安定性を向上できます。 (2)バスの自動運転・隊列走行技術 ①異なる車種の組み合わせによる自動運転・隊列走行 3車種(連節・大型・小型)のバスをさまざまな組み合わせや順序にして、先頭車はレベル3、後続車はレベル4相当で専用道を自動運転・隊列走行できることを確認しました。これにより、運行区間ごとに隊列の形成・解除を行って車両編成を柔軟に変更することで、後続車のドライバーの増員を抑えつつ、需要に応じた輸送力を確保できます。 ②先頭車のドライバーの操作による、隊列内の全車両のドア開閉、車内アナウンス ドライバーがいる先頭車から安全に後続車のドア開閉ができることを確認しました。また、先頭車から後続車の車内アナウンスを実施することに成功しました。後続車にドライバーを配置しない場合にも、先頭車のドライバーが後続車へ必要な情報提供を行うことができます。 (3)信号・踏切連携 ①車両の位置情報に基づく専用道単一車線区間での交互通行制御 車両の位置情報に基づく信号制御により、車両が単一車線区間への進入可否を自動で判別し、対向車がいる場合にも安全に交互通行する技術を実現しました。 ②専用道と一般道の交差部を想定した信号・踏切制御 専用道と一般道の交差点で、専用道を走行する車両の位置情報に基づき、車両の接近や通過に合わせて交差点の信号を制御することに成功しました。さらに、専用道と鉄道が並走する場合に、専用道を走行する車両に合わせて既存の踏切を同様に制御することにも成功しました。また、一般道側の信号が停止表示になった後から自動運転車両が通過するまでの間に、当該交差点の専用道内に一般車などが取り残されている状態を検知した場合に、信号システムが自動運転車両を停止させる技術の開発を行いました。これにより、「自動運転・隊列走行BRT」の安全性と定時性を向上することができます。 (4)運行管理・指令 ①運行管理・指令システムからの指示による隊列形成・解除 運行管理・指令システムの指示により、運行ダイヤに基づき所定の場所でバスの隊列を形成・解除する技術を開発しました。これにより、ドライバーの増員を抑えつつ、走行区間が異なるバスを途中駅で組み入れたり外したりすることができ、需要に応じた車両編成での運行が可能になります。 ②遠隔地からの車内監視 バスに設置したカメラおよび通信機器により、運行管理を行う遠隔拠点から、自動運転中の車内映像や車両情報などを監視できることを確認しました。これにより、車内の安全性や乗客の安心感を向上させることができます。 ③車両位置に応じた乗客向けの案内表示・アナウンス 運行ダイヤと車両の位置情報に基づいて乗客向けの案内表示とアナウンスができることを確認しました。また、緊急停止などの際は、運行管理を行う遠隔拠点から、乗客向けにアナウンスするための技術開発を行いました。これにより、乗客の安心感を向上させることができます。 ④駐車場への入出庫制御 駐車場に到着した車両が、隊列解除後に各車の所定駐車位置(車室)へ自動で入庫したり、運行前に各車が自動で出庫して所定の場所まで移動したりするための技術開発を行いました。これにより、入出庫にかかるドライバーの負荷軽減を図ることができます。 (5)通信技術 ①高い安全性・低遅延のプライベート5Gを使った車車間通信 閉域接続で車車間通信を行うことができ、LTEと比べて遅延時間が約3分の2※のソフトバンクの「プライベート5G(共有型)」(2023年3月29日提供開始)を車車間通信に用いて、自動運転・隊列走行ができることを確認しました。 ※ 専用テストコース(滋賀県野洲市)での実測値 ②光無線を使った車車間での直接通信 光無線通信機と通信相手をトラッキングする装置を車両に装着し、基地局などを介さずに車車間で光無線通信を直接行い、超低遅延(0.3~0.6ms)で広帯域(100Mbps)の通信により自動運転・隊列走行ができることを確認しました。今後、装置の小型化など社会実装に向けた改良を図ります。 |
|
|
|
|
|
|
NEWS RELEASE:JR&私鉄 4
| ひろやす/伊藤(vnnc8158) 2023-11-02 03:36:29 |
|
2023年11月1日
東 広 島 市 西日本旅客鉄道株式会社 自動運転・隊列走行BRT 東広島市での実証実験開始と内容詳細について 東広島市と西日本旅客鉄道株式会社(以下「JR西日本」という。)は、自動運転・隊列走行BRTの実証実験を、2023年11月7日(火)から西条駅~広島大学東広島キャンパスを結ぶ県道・市道「ブールバール」において開始しますのでお知らせします。 併せて、実証実験の内容について、2023年9月15日(金)付の東広島市プレスリリースにてお知らせしておりましたが、現時点の詳細をお知らせします。 1. 目的 (1) BRTや自動運転・隊列走行技術の社会実装に向けた課題の検証・洗い出しを行うこと (2) 市民をはじめとした方々に BRT や自動運転・隊列走行等の新技術に関心を持って頂くこと 2. 実施期間・スケジュール ┌─────┬────────────────┬───────────┐ │ │2023年11月7日(火)~12月27日(水) │2024年1月中旬~2月上旬│ ├─────┼────────────────┴───────────┤ │実施時間 │概ね 9:30~16:30(混雑時間帯を避けた時間) │ ├─────┼────────────────┬───────────┤ │運行内容 │準備走行、技術検証走行 │実証走行 │ ├─────┼────────────────┼───────────┤ │試乗 │なし │あり │ ├─────┼────────────────┼───────────┤ │土日祝運行│なし(必要により土日祝も実施) │あり │ └─────┴────────────────┴───────────┘ ※11月7日(火)10:30に大学会館前から手動運転で準備走行を開始します (自動運転は行いません) 3. 実施体制と役割 ┌──────────────┬───────────────────┐ │ 名称 │ 役 割 │ ├──────────────┼───────────────────┤ │東広島市 │事業主体、政策形成 │ ├──────────────┼───────────────────┤ │JR西日本 │全体管理、自動運転バス車両提供 │ ├──────────────┼───────────────────┤ │中国ジェイアールバス株式会社│テストドライバー、車両保守 │ ├──────────────┼───────────────────┤ │ソフトバンク株式会社 │実証実験データ分析、通信提供 │ ├──────────────┼───────────────────┤ │先進モビリティ株式会社 │自動運転制御システム │ ├──────────────┼───────────────────┤ │株式会社TAISEI │給油オペレーション │ ├──────────────┴─────┬─────────────┤ │ジェイアール西日本コンサルタンツ株式会社│導入に向けた地上設備検討 │ ├──────────────┬─────┴─────────────┤ │国土交通省中国地方整備局 │路車協調システム実証実験の路側機器提供│ ├──────────────┼───────────────────┤ │広島県 │道路管理者、各種アドバイス │ ├────────────┬─┴───────────────────┤ │広島大学 │実証実験アンケート分析協力、各種アドバイス│ ├────────────┴─┬───────────────────┤ │芸陽バス株式会社 │実証実験時の運行協力、各種アドバイス │ └──────────────┴───────────────────┘ 4. 予算 (1) 国土交通省地域公共交通確保維持改善事業(自動運転実証調査事業) (2) 国土交通省自動運転実証調査事業と連携した路車協調システム実証実験 5. 実施内容 (1) 実施項目 ① 技術面 ○ 連節バス、大型バスによる自動運転 ・RTK-GNSS※1を使用した自己位置推定 ・ACC※2による一般車が混在する中での走行 ・信号連携は実施せず、手動介入によって交差点では安全確保 ○ 2台の自動運転バス車両による隊列走行 ・LTE回線による車車間通信 ・CACC※3による車間距離制御 ○ 自動運転レベル2※4 ・先頭車、後続車共にテストドライバーが乗車 ・実験項目は将来のレベル4※5認可取得を目指した内容 ○ 路車協調システムによる発車支援 ・車載センサの死角を路側センサが補完 ・発車時の安全性向上を検証 ○ 速度40km/h(ブールバールの制限速度は50km/h) ② 経営面 ○ 実装時に求められる車両、地上設備の概略検討 ③ 社会受容性面 ○ イベントを通じたアンケート調査 ○ 試乗会を通じたアンケート調査 ※1 GNSS(衛星測位システムの総称)から受信する信号を利用して RTK 測位(相対測位)を行うことで高精度測位を実現する技術 ※2 Adaptive Cruise Controlの略、車両前方に取り付けたセンサで前方を走行する車両との車間距離を保って走行する技術 ※3 Cooperative Adaptive Cruise Controlの略、車車間通信する車両が相互に情報をやりとりすることで、より精密な車間距離制御を行って走行する技術 ※4 ドライバーが運転操作の主体であり、システムがアクセル・ブレーキ操作およびハンドル操作の両方を部分的に実行 ※5 一定の条件下でシステムが全ての運転操作および作動継続が困難な場合への対応を実行 (2) 車両 ┌──┬──────────────────┬──────────┐ │ │ 連節バス │ 大型バス │ ├──┼──────────────────┴──────────┤ │外観│ *伊藤注:添付画像をご覧下さい。 │ ├──┼──────────────────┬──────────┤ │定員│103名(着席 37名)※試乗時は着席のみ│32名※試乗は行わない│ ├──┼──────────────────┼──────────┤ │長さ│17.99m │11.27m │ ├──┼──────────────────┼──────────┤ │幅 │2.49m │2.49m │ ├──┼──────────────────┼──────────┤ │高さ│3.26m │3.21m │ └──┴──────────────────┴──────────┘ (3) 自動運転に関する装置 ① LiDARセンサ 前方対象物の距離および形状を識別するための機器 ②ステレオカメラ 前方対象物の距離、形状、および、白線を識別するためのカメラ ③遠赤外線カメラ 前方対象物が発する遠赤外線を検知・認識するためのカメラ ④GNSSアンテナ 衛星測位のために、みちびき等の衛星信号を受信するためのアンテナ ⑤LTEアンテナ LTE回線を送受信するためのアンテナ (4) 走行経路 1周約12km(うち、自動運転区間約6km) ①自動運転区間 中央公園前バス停(市役所側)→池ノ上学生宿舎前バス停3.2km ②手動運転区間 池ノ上学生宿舎前バス停→大学会館前バス停2.0km ③手動運転区間 大学会館前バス停→池ノ上学生宿舎前2.8km ④自動運転区間 池ノ上学生宿舎前→中央公園前バス停(くらら側)3.2km ⑤手動運転区間 中央公園前バス停(くらら側)→中央公園前バス停(市役所側)0.6km (5) 隊列走行区間 ①池ノ上学生宿舎前→中央公園前バス停(くらら側)に向かう自動運転区間の中において、池ノ上学生宿舎前→御薗宇ランプ交差点1.5kmの範囲内において実施 ②連節バスが先頭車、大型バスが後続車で走行 ③車間距離は15mを基本として、準備走行での状況も踏まえて調整 6. 試乗会(予定) (1) 運行概要 ①試乗会期間 1月中旬~2月上旬 土日含む12日間 ②運賃 無料 ③区間 中央公園前バス停(東広島芸術文化ホールくらら前)付近から乗車 5-(4)に記載の走行経路を周回、途中停留所無し 大学会館前にて車両等見学時間を設ける予定 中央公園前バス停(東広島芸術文化ホールくらら前)付近で降車 ④運行ダイヤ 1日4便程度、1便あたり1時間程度の行程 ⑤定員 1便あたり25名程度 ⑥その他 荒天時(警報、降積雪、路面凍結等)には運休あり 一部、関係者試乗会(一般試乗枠無し)を行う便を設定 (2) 乗車方法 ①事前予約制 コミュニケーションアプリ「LINE」からのインターネット予約 ②予約開始日 予約開始日は12月中旬頃を予定 ③お知らせ方法 市報等を用いてお知らせするほか、「LINE」にて「東広島市BRT自動運転 公式アカウント」と「友だち」になって頂くと、試乗会予約開始のお知らせや、準備走行の様子のお知らせなどを随時送信予定 7. 皆様へのお願い (1) 自動運転バス車両の走行の仕方について ①自動運転バス車両の走行の仕方には以下のような特徴があります ・第1通行帯(歩道寄りのレーン)を走行しますが、路側帯の駐停車車両は自動で避けられませんので、手動に切り替えて安全に回避する必要があります ・加速・減速は、安全に配慮して通常のバスよりもゆるやかです ・設定速度は、安全に配慮して40km/hと設定しており、ブールバールの制限速度よりもゆっくり走ります ・連節バスは18mあるため、バス停停車時に前方または後方が若干バス停からはみ出すことがあります ・連節バス(18m)と大型バス(12m)が隊列で走行する際は、車間距離(15m)を含めて45mの長編成となります ・車両の前方、もしくは隊列走行の先頭車と後続車の間などに急な割り込みがあった場合、急ブレーキが作動します ②自動運転バス車両には、実証実験期間中の終日、手動区間・回送区間も含めて下の通り車体標記を行います。 自動運転 公道実証実験中 ③自家用車を運転される皆様には、実験期間中ご迷惑をおかけしますが、自動運転バス車両周辺での運転の際はご配慮頂けますと幸いです (2) 実証実験期間中の自動運転バス車両の車庫について ①東広島市消防局に駐車します ②実証実験走行経路から東広島市消防局までの回送においては、自動運転は行いません ③各種センサ等の故障につながるため、お手を触れないにようにお願いします ④外からご覧頂くことは出来ますが、緊急車両の出入り等、消防業務の妨げにならないようにお願いします (3) 特別な許可を得た駐車について ①実証実験を円滑に行うために、以下の3か所について実証実験バス車両のみ駐車可の標識を立てて駐車もしくは一時停車します ・大学会館前バス停向かい側の車寄せ(実験時間中は赤色コーンを設置します) ・旧ががら口バス停(実験時間中は赤色コーンを設置します) ・中央公園前バス停~西条駅南口交差点の一部区間 ②ご迷惑をおかけしますが、ご協力をよろしくお願いします (4) 自動運転バス車両によるデータ取得について ①本実証実験では自動運転車両にカメラ等を設置し、自動運転バスの検証に活用します ②取得データは本実証実験の目的の範囲内のみで利用し、取得したデータや映像から個人を特定することはありませんので、ご理解のほどよろしくお願いします 8. お知らせ (1) 東広島市生涯学習フェスティバル(2023年11月3日(金・祝)、4日(土)) ①終日パネル展示を行います ②各日11時~12時、13時~14時、15時~16時の3回、BRTや自動運転・隊列走行について知って頂くワークショップを開催します(座席数は20名程度、先着順) (2) 広島大学学園祭(2023年11月5日(日)) ①終日ブースにてパネル展示を行います ②簡単なアンケートを実施予定です |
||
|
||
|
|
